3.29 Car Backing Radar
3.29.1 Overview
When a car is in reverse, it will alarm the distance of the obstacles behind the parking space. In this project, we build a mini car backing radar with an ultrasonic sensor for distance detection, a speaker to alarm, and a traffic light module as an indicator.
3.29.2 Test Code
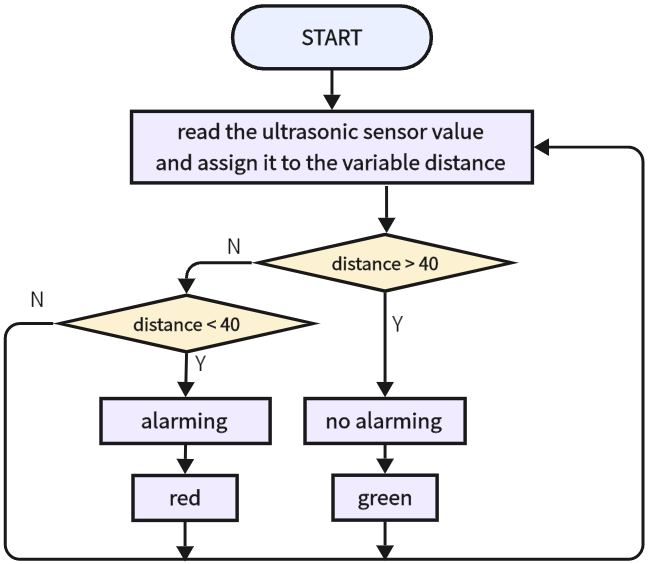
Code Flow:
Code:
In Files, open 3-29-parkingSensor.py and click  .
.
'''
* Filename : 3-29-parkingSensor
* Thonny : Thonny 4.1.4
* Auther : http//www.keyestudio.com
'''
from machine import Pin,PWM
import time
#set PWM output pin to IO32, frequency to 5000 Hz, duty cycle to 50% (the middle value of 8 bit resolution is 128, duty cycle ranges from 0-255)
spk = PWM(Pin(32), freq=5000, duty=128)
redLED = Pin(23,Pin.OUT)
greenLED = Pin(27,Pin.OUT)
# Define the control pins of the ultrasonic sensor
Trig = Pin(5, Pin.OUT)
Echo = Pin(4, Pin.IN)
distance = 0 # set initial value to 0
soundVelocity = 340 #Set the speed of sound.
# getDistance() Function is used to drive the ultrasonic module to measure distance,
# Echo.value() is used to read the status of the Echo pin of the ultrasonic module,
# The timestamp function of the time module calculates the high level of the Echo's duration pin, calculate the measured distance based on the time and returns a value.
def getDistance():
# maintain Trig pin at a high level of 10us to enable the ultrasonic sensor
Trig.value(1)
time.sleep_us(10)
Trig.value(0)
#Start timing, the initial time of ultrasonic propagation in the air
while Echo.value() == 0:
Start = time.ticks_us()
#The time of receiving the reflected ultrasonic wave
while Echo.value() == 1:
Stop = time.ticks_us()
#The received time minus the initial time is the total time
Time = time.ticks_diff(Stop,Start)
#Calculate the distance according to the formula gives the result in meters.
#Divide by 1000 to convert to centimeters.
distance = Time * soundVelocity //2 // 10000
#return the calculated value
return distance
# print the ultrasonic sensor value every 500ms
while True:
distance = getDistance()
print('Distance: ',distance, 'cm')
if distance > 40: #determine whether the distance > 40. If yes, green led is on, speaker does not emit sound; If not, red led is on and speaker emits sound
redLED.off()
greenLED.on()
spk.duty(0) #speaker does not emit sound
else:
redLED.on()
greenLED.off()
spk.duty(50) #set speaker PWM duty cycle
spk.freq(880) #set speaker frequency
time.sleep_ms(300)
Result:
After uploading code, when the the detected distance value is greater than 40cm, the green LED is on and the amplifier does not emit sound. If the value is less than 40cm, the red LED will light up and the amplifier will alarm.